一隻“手”,難倒人形機器人
2024-11-01 01:36:22 3
作者 | 程茜
編輯 | 心緣
智東西10月31日報道,就在昨天,波士頓動力放出了人形機器人Atlas在工廠已經上崗就業的影片。影片中的Atlas可以自主在兩個地點移動,將汽車的發動機蓋放到準確的位置。
▲波士頓動力Atlas在工廠搬運零件
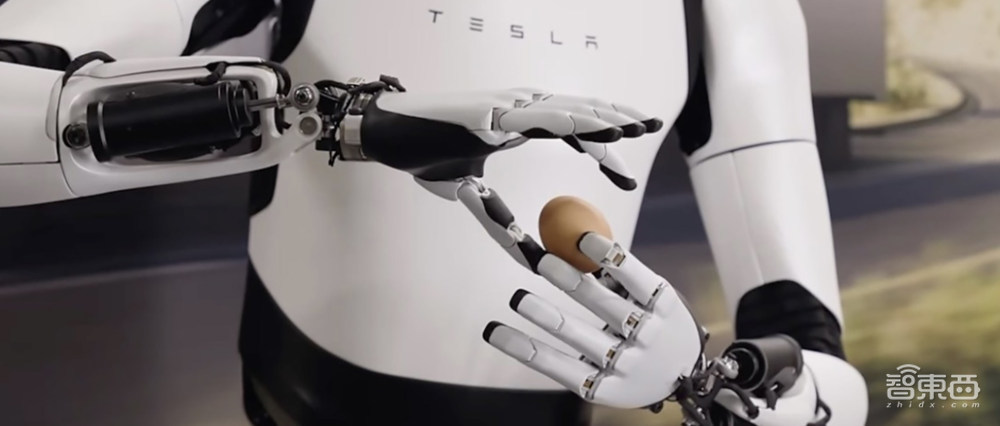
還有前不久的特斯拉數十臺擎天柱(Optimus)機器人,也展現出超強運動控制能力。它們在釋出會現場與觀眾親切交談,說話時伴隨著手部動作,還能倒飲料、提袋子、遞送。
▲特斯拉擎天柱演示(圖源:特斯拉)
上述兩個場景中,人形機器人下肢的移動能力和穩定性已經基本可以應對各種環境,能讓其搬運重物、遞飲料或者疊衣服、擰螺絲的關鍵就是機器人最末端的靈巧手,這也是機器人研發最難的一環。
當下,評判靈巧手效能的最重要一個標準就是自由度,目前市面上靈巧手的自由度在6-42個之間,其中以6個自由度為主流,這也導致相比於人手的27個自由度,當下人形機器人的精細化操作能力欠缺。
但自由度又與靈巧手成本相關。英國仿生靈巧手老牌企業Shadow Robot的Shadow靈巧手系列自由度已經達到24個,擁有超100個感測器,但售價達到100萬~220萬元,價格甚至比馬斯克預計的人形機器人本體價格高10倍,馬斯克預計售價2萬~3萬美元(摺合約14~21萬人民幣)。
▲Shadow Robot的Shadow靈巧手(圖源:Shadow Robot)
現在人行機器人產業鏈發展逐漸細分,從整機到專攻關鍵零部件的企業湧現,靈巧手就是近年來興起的人形機器人產業中非常關鍵的一類產業鏈細分方向。
國內靈巧手產業湧現出靈巧手企業/創企、人形機器人創企、高校與科研機構三類企業,正試圖找到其效能和成本的平衡點。目前已公開售價的產品價格在0.99萬元~11萬元不等,其中一個代表性企業就是靈巧手創企靈心巧手,據瞭解,該公司的靈巧手自由度目前已經達到業界最高42個,其公開售賣的20個主動自由度靈巧手價格僅為4.99萬元。

▲2024科技創變者大會靈心巧手聯合創始人、CTO周永公佈靈巧手價格
不過,這對於人形機器人的商業化落地而言遠遠不夠。想要達到類比人類的靈巧手效能,還需要更多感測器獲取資料作為執行任務的依據。
還有讓其實現批次生產的難題在於,靈巧手採用的電機等核心零部件價格高,使得單個靈巧手內電機成本在2.6萬~6.5萬元之間;以及其內部核心零部件在效能、輕量化和成本之間的平衡。
智東西試圖深入靈巧手市場,找到人形機器人商業化落地的突破口。
一、人形機器人“心靈手巧”關鍵,佔整機成本14%
清華大學計算機系教授、智慧技術與系統國家重點實驗室副主任孫富春曾提到:“機器人是自動化的‘最後一公里’,靈巧手是機器人‘最後的一釐米’。”
靈巧手是模仿人手設計的高精度機械手,工業機器人領域的靈巧手大多采用三指設計,而人形機器人大多為五指。靈巧手是實現精細操作的基礎,因為一旦其需要進行精細裝配、拿取微小零件等,簡單的抓夾、吸盤就無法做到。與人形態更相近的人形機器人,更是需要完成抓、握、捏、擰、旋轉等不同動作,滿足多元化的場景需求。
因為靈巧手的設計仿照人手,人體解剖學著作《格蘭特解剖學圖譜》中寫道,人手本體自由度為21個,加上手腕關節運動自由度有27個。因此在自由度的分配上,靈巧手也仿照了人手。

▲人手解剖學示意圖(圖源:知乎博主任賾宇,此前擔任珞石機器人首席系統工程師)
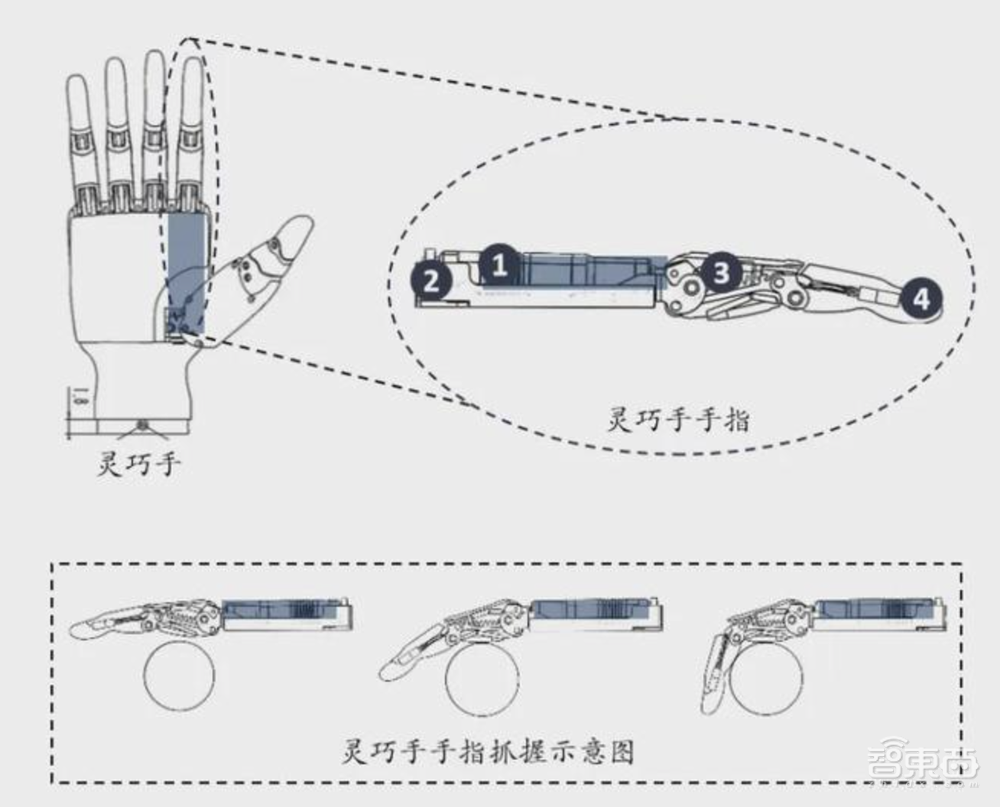
從運動學角度來看,靈巧手需滿足兩個必要條件:在指關節運動時使物體產生任意運動、指關節固定時能完全限制物體運動,所以在此基礎上,靈巧手需要至少3根手指、9個自由度。
目前,從形態來看,靈巧手主要有五指和三指兩種,也有人形機器人廠商選擇從二指、三指夾爪向靈巧手過渡,以滿足當下機器人的應用需求。從其自由度數量來看,正好處於6個-42個之間。
人形機器人的商業化落地方面,靈巧手的重要性也不容忽視。雖然體積並不大,但其成本佔到人形機器人整體成本的14%~18%。摩根士丹利的資料顯示,特斯拉第二代人形機器人擎天柱靈巧手佔比達到17.3%,以其整機成本5萬~6萬美元(摺合約35萬~43萬人民幣)計算,靈巧手的成本在8650美元~10380美元(摺合約6萬~7.3萬人民幣)之間。
靈巧手是機器人與外界互動時獲得觸覺反饋的關鍵。靈巧手上搭載的觸覺感測器、力感測器,可以幫助機器人感受物體的形狀、大小、硬度、溫度等,而不是僅透過視覺互動。
一個典型的靈巧手系統的關鍵部分包括驅動、傳動、感測器和控制系統。驅動系統負責提供動力,傳動系統將這些動力轉換為手指關節運動,然後觸覺系統用於感知手部與外界物體的接觸狀態和力度,控制系統是透過演算法和軟體對驅動系統和傳動系統進行控制。
▲靈巧手的抓握示意圖(圖源:因時機器人)
這一波人形機器人熱潮催化下,作為其關鍵部件之一的靈巧手,原先多用於科研、假肢等領域的靈巧手,並在單獨做靈巧手的企業之外,衍生出人形機器人賽道的產業玩家。
二、三類玩家競逐,國產靈巧手售價降到低於萬元
當下在這一賽道角逐的共有三類玩家:人形機器人創企、靈巧手創企、科研機構。其中,非人形機器人玩家的靈巧手產品均為公開售賣,科研機構以技術研發為主,人形機器人創企又分為僅自研以及同時支撐自研、單獨售賣的。
1、靈巧手企業/創企:最低售價不到萬元,最高自由度可達42個
國內專門做靈巧手的企業/創企中,目前已公開售價的產品價格在0.99萬元~11萬元不等。
其中,因時機器人、強腦科技、傲意科技等玩家的靈巧手均有6個自由度,大多隻能完成手指向內抓取物體的動作,手指左右晃動等動作無法完成。因時機器人市場總監房海南談道,其靈巧手自由度為6個,是綜合靈巧手成本、可靠穩定性、綜合量產能力、抓取效果來綜合選擇的方案。這也是當下產業中大家都選擇6個自由度的原因,可以基本上完成人手的60%~70%的抓取任務。
據房海南在2024科技創變者大會上透露,截至今年8月,因時機器人的靈巧手累計出貨量已經達到幾千臺,其中人形機器人的靈巧手銷售額已經達到一半以上。
與大多數玩家的靈巧手不同,靈心巧手的LinkerHand系列靈巧手主動自由度在12~42個之間,單指為2~7個。靈心巧手聯合創始人、CTO周永認為,靈巧手需要達到20個以上的自由度才能完全對映人類動作,多感測器需要能夠感知到位、力、觸、摸。
▲LinkerHand靈巧手演示(圖源:靈心巧手)
該公司SE版的靈巧手是目前國內靈巧手唯一價格在萬元之下的,不過該公司並未公佈其具體引數;Pro版的主動自由度為20個,售價4.99萬元。此外,其系列產品還實現了360度自由旋轉,並配備了指尖攝像頭、觸覺感測器、位置感測器、力感測器等多感測器系統。

▲單獨售賣靈巧手的企業/創企(整理自公開資訊,智東西製表)
2、人形機器人創企:多為支撐本體自研,僅兩家單獨售賣
這類企業中公開售賣靈巧手的玩家有鈦虎機器人、帕西尼感知兩家。
鈦虎機器人的靈巧手單隻價格在2萬元左右,不過如果要增加更多感測器,售價可能會提升至3萬~4萬元之間。其靈巧手有6個自由度,每個手指都可以獨立運動,其中大拇指能進行兩個方向運動,其靈巧手與鈦虎機器人的人形機器人系列手部自由度一致。
與其他廠商不同,帕西尼感知的靈巧手更注重多維觸覺感測,其第二代靈巧手DexH13擁有13個自由度,單手擁有978個ITPU多維觸覺感測單元,15種多維觸覺感知能力。
第二代多維觸覺人形機器人ORA-ONE雙手整合近2000個自研的ITPU多維觸覺感測單元,能瞬間捕捉並解析接觸面上細微形變與多維度觸感資訊,其靈巧手自由度已經提升至26個。
其餘人形機器人創企自研的靈巧手自由度大多為6個、12個,且僅用於支撐自家人形機器人研發。
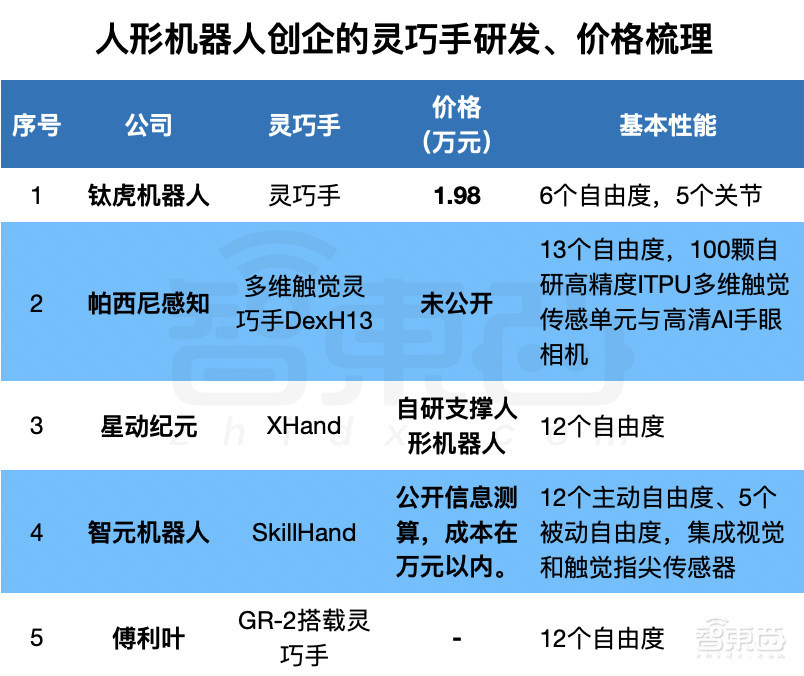
▲人形機器人創企靈巧手研發、價格梳理(整理自公開資訊,智東西製表)
全球爆火的特斯拉擎天柱靈巧手自由度也是如此。特斯拉去年年底釋出的第二代擎天柱的靈巧手擁有11個自由度,10月11日,特斯拉CEO埃隆·馬斯克透露,其下一代Optimus的手將擁有22個自由度。
其餘OpenAI大模型加持的Figure 01與波士頓動力的Atlas目前並沒有公開自家機器人靈巧手的自由度;小米鐵大的手為雙指抓夾,只能夾取物體。
3、科研機構、高校:專注於提升自由度、負載能力
除此以外,還有哈爾濱工業大學、中國科學院自動化研究所、清華大學AI智慧研究員智慧機器人、騰訊Robotics X實驗室等科研機構和高校,專注於靈巧手的研發。
其中,中國科學院自動化研究所的神經擬態靈巧手機器人CasiaHand,具有25關節自由度、21驅動自由度,還包括五個手指、掌部和腕部,仿人筋腱驅動方式,指尖仿人觸覺感知能力,位置、力、觸覺、溫度多模態感測93個。
此外,其研發重點還有靈巧手的負載能力,目前市面上單個靈巧手的負載集中於3kg~5kg,中國科學院自動化研究所的團隊已經研發出負載7kg的版本,下一步計劃將負載提升到15kg以上。
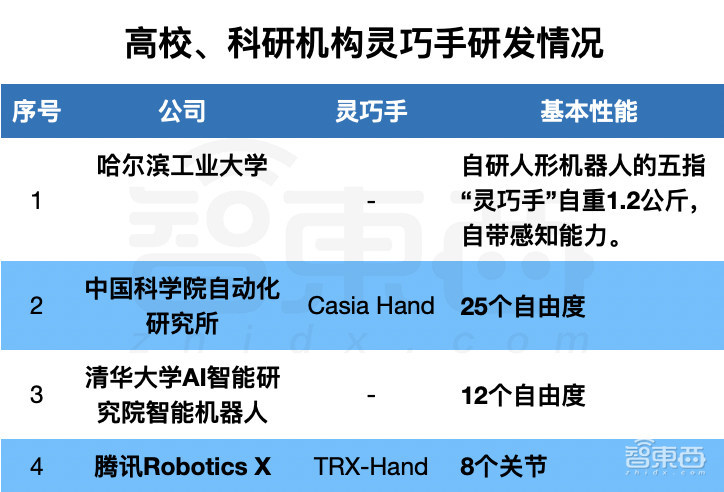
▲高校、科研機構靈巧手研發情況(整理自公開資訊,智東西製表)
可以看出,這些研究機構對於靈巧手的研發,多集中在自由度提升、感測器數量、負載能力方面。
三、靈巧手瓶頸:單手空心杯電機成本6.5萬,一隻手塞上百個感測器
20世紀70年代末,工業自動化需求增長,靈巧手的概念出現。
早期,靈巧手發展的典型代表就是日本“電子技術實驗室”的Okada靈巧手,其拇指有3個自由度,另外2個手指各4個自由度;美國斯坦福大學的Stanford/JPL靈巧手,也是擁有3個手指,每個各有3自由度;美國麻省理工學院和猶他大學研製的Utah/MIT靈巧手有4個手指,每個4個自由度。
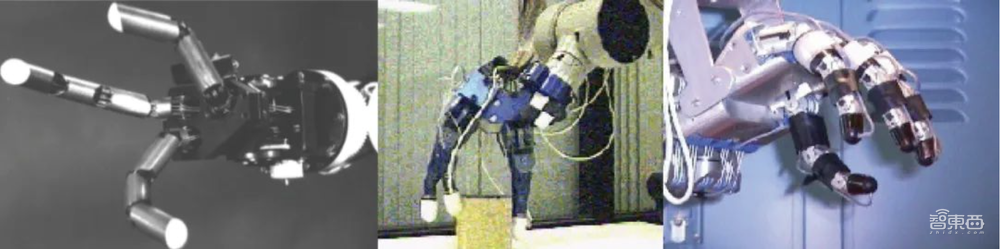
▲從左至右分別為Okada靈巧手、Stanford/JPL靈巧手、Utah/MIT靈巧手(圖源:小米技術)
發展至今,這一產業有幾大明顯的趨勢。除了自由度提升外,靈巧手搭載的感測器數量翻番,驅動方式選擇上除效能外會兼顧商業化等。
首先其搭載的感測器數量翻番。20世紀末,產業開始關注靈巧手的感知能力進階,當時德國宇航中心研發的DLR-Ⅰ和DLR-Ⅱ靈巧手共整合了25個感測器,現在靈巧手的感測器數量已經達到近百個。感測器監測到的資料就是控制演算法進行決策的依據。戴盟機器人首席科學家王煜教授說,靈巧手接觸到物體時的反饋是非常重要,沒有主動的反饋就沒有靈巧操作,靈巧手的發展就卡在這裡。
因此要讓靈巧手收集到更多的高質量資料帶來的挑戰就有兩大方面,一是感測器數量增加對應著靈巧手的成本增加,二是面對大量資料,控制演算法處理複雜任務時響應速度會變慢,無法實現精準、高效控制。
其次,當下單價較高的電機驅動已經成為靈巧手的主流技術方向。除了效能優勢外,電機驅動的技術較為成熟,相關零部件和控制系統已經形成一定的標準和規劃,便於進行大規模量產。
靈巧手內部空心杯電機數量不斷提升,但單個空心杯電機的價格並不低。國外驅動系統供應商Maxon的空心杯電機單價為4675元,愛採購頁面顯示,國內兆威機電空心杯電機的單價在2000元左右。

▲兆威機電的空心杯電機價格(圖源:愛採購)
一般情況下,靈巧手的自由度與驅動電機相對應,如果折中計算,假設單個靈巧手的自由度為13,對應驅動電機需要13個,成本已經達到2.6萬~6.5萬元之間。
這一市場長期被國外巨頭所壟斷,不過目前國內鳴志電器、偉創電氣、雷賽智慧、兆威機電等企業也推出了空心杯電機相關產品,其中,偉創電氣在回覆投資者問時透露,該公司在空心杯電機產品方面可以提供完整的模組解決方案,適用於靈巧手10mm的空心杯電機模組正在推向市場,已經取得小批次訂單。不過,整體來看,國內對於機械結構等要求更加嚴格的人形機器人應用,其效能距離頭部玩家仍有一定差距。
第三,這些趨勢都顯示靈巧手的內部結構零部件數量越來越多、機械結構逐漸精密,但還有一大前提是其本身體積並不大,如何平衡零部件數量、效能與小型化、輕量化之間的關係,也是這一產業發展的一大瓶頸。
上個月,Shadow Robot總監裡奇·沃克(Rich Walker)曾在接受《衛報》採訪時談道,機器人靈巧性的挑戰之一就是體積。Shadow靈巧手的大小與人的手掌相當,有四根手指和一根拇指,但其需要連在比人類手臂寬得多的機械臂上,用以承載電纜、執行器等諸多部件。
這是因為靈巧手想要達到人手的操作水平,需要安裝多個關節、感測器、傳動裝置等。其中電機數量要與關節數量一致,才能達到全驅動,實現對靈巧手的精準控制。
目前一些企業為了控制靈巧手內部的電機數量,會同時採用全驅動和欠驅動方式,欠驅動指的就是沒有提供對應的驅動器數量,而是基於其它外部力量驅動。但欠驅動系統容錯能力較差,需要更加準確的動態模型和控制演算法,這也增加了靈巧手運動過程的風險。
最後還有諸如關節耐久性、重量等,是之後人形機器人實現大規模應用,走進真實落地場景過程中需要一直考量的難題。
目前國內已經誕生了專門做靈巧手的玩家,並且已經擁有一定的價格優勢,在當下可匹配人形機器人的應用場景。
結語:人形機器人落地前夜,靈巧手迎千億市場
從當下人形機器人市場的發展來看,其在下肢能力的進展飛速,諸如跑跳、走路等都有了較大突破,但對上肢而言,其靈巧手不僅是機器人實現精細操作的關鍵,同時也是讓人形機器人降本,真正實現量產的關鍵。市場調研機構頭豹研究院的報告顯示,根據特斯拉預測,人形機器人將於3-5年達成量產,量產後,靈巧手市場將爆發式增長,預計2030年將突破800億元。
具體而言,從材料、核心電機到感測器、雷達等感知系統,靈巧手都需要技術創新和成本控制。但宏觀來看,這些零部件和系統在人形機器人的其他部件上也有應用,因此這同樣可以帶動整個人形機器人技術的進步。
參考資料:小米技術公眾號《機器人中的“百達翡麗” — 五指精密仿生靈巧手技術淺析》
本站內容由互聯網用戶自發貢獻,該文觀點僅代表作者本人。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。如發現本站有涉嫌抄襲侵權/違法違規的內容,請發送郵件至舉報,壹經查實,本站將立刻刪除。