Meta公佈機器人觸覺感知能力研究成果
2024-11-05 01:35:04 2
原標題:Meta 公佈機器人觸覺感知能力研究成果:利用手指感測器結合“AI 大腦”理解 / 操作外界物體
IT之家 11 月 4 日訊息,Meta 釋出新聞稿,介紹了旗下 FAIR(基礎人工智慧研究)團隊對於機器人觸覺感知能力的研究情況,這項研究旨在讓機器人透過觸覺方式進一步理解和操作外界物體。
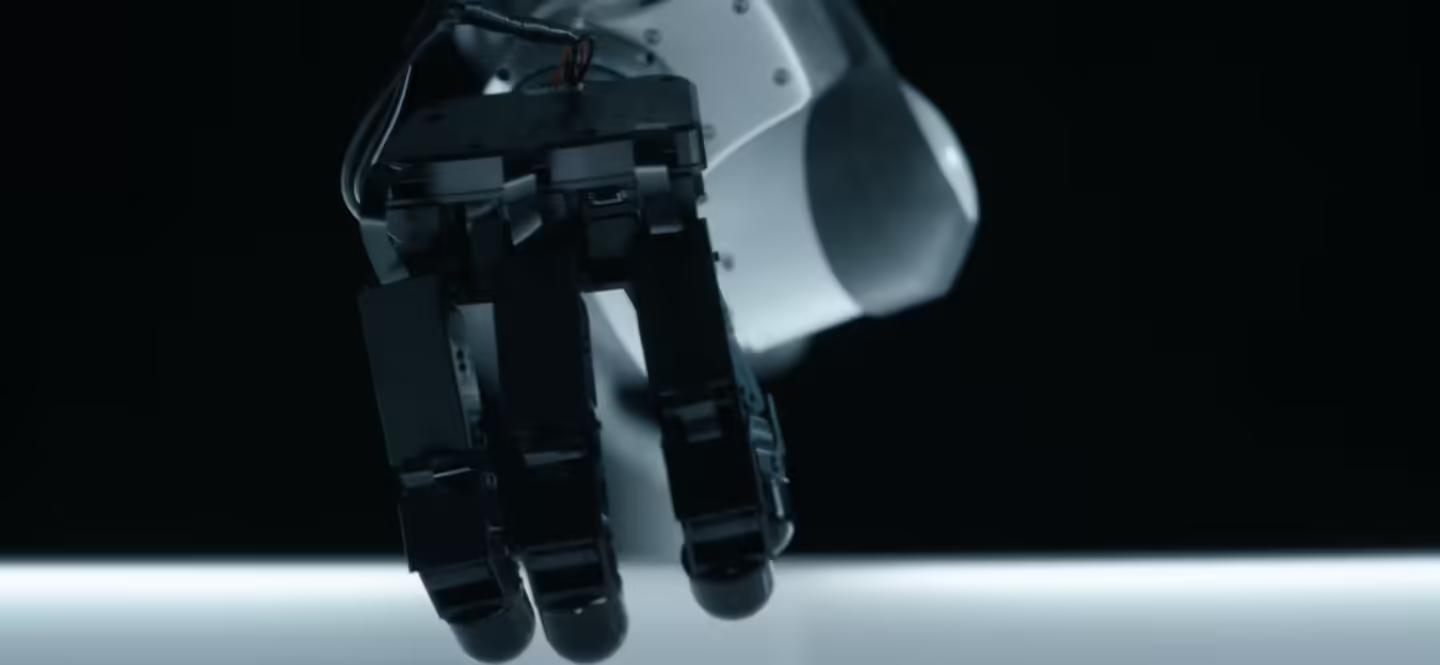
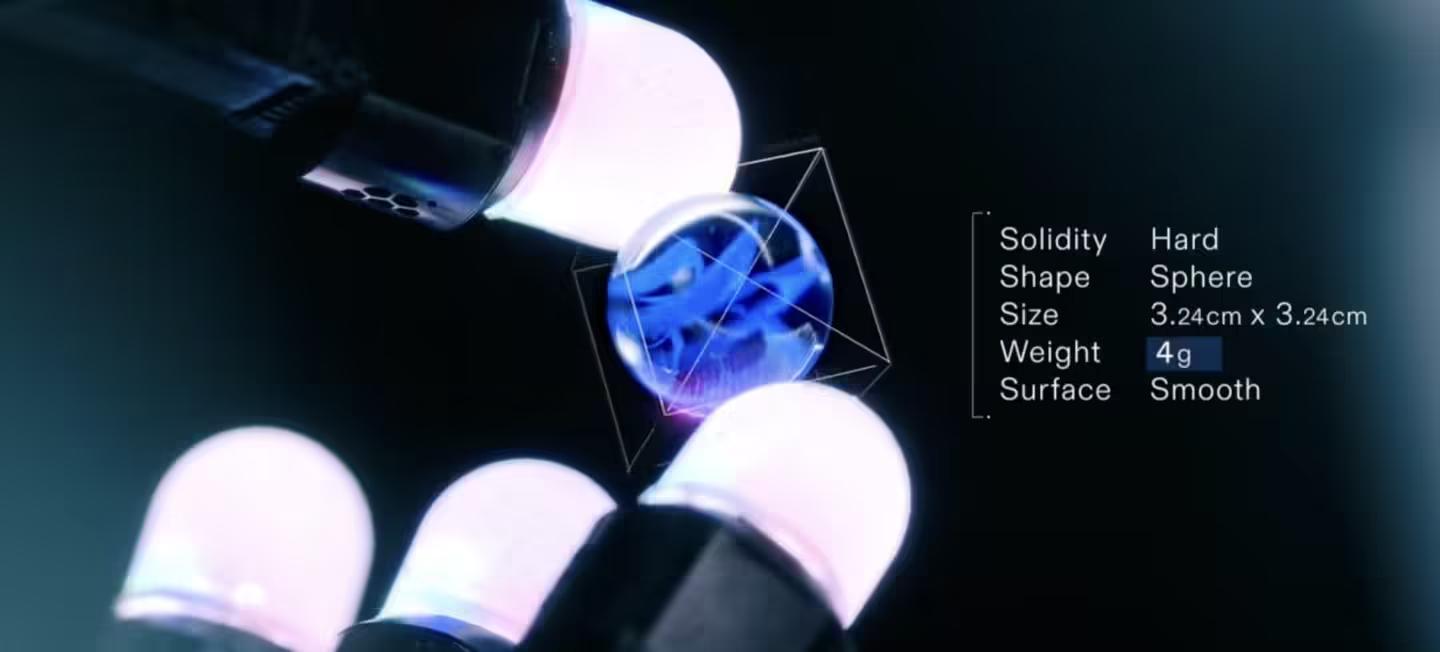
Meta 表示,打造相應 AI 機器人的核心在於讓機器人的感測器感知理解物理世界,同時利用“AI 大腦”精確控制機器人對物理世界進行反應,而團隊目前開發的機器人觸覺感知能力主要就是為了讓機器人檢測其互動的物體的材質與觸感,以便於讓 AI 判斷機器人應當如何操作這些裝置(例如拿起雞蛋等場景)。
▲ 圖源 Meta (下同)
IT之家參考 Meta 公佈的文獻獲悉,Meta 目前一共公佈了 Meta Sparsh、Digit 360 和 Meta Digit Plexus 等多項研究成果,其中 Meta Sparsh 是一種基於 AI 的觸覺編碼器,主要利用 AI 的自我監督學習能力實現跨場景的觸覺感知,讓機器人的 AI 大腦在學習對於某種物體的“觸感”後,即可在各種場景靈活“感知”相關物品的特性。
而 Digit 360 則是一種高精度感測器,該感測器主要部署在機器人手指上,號稱具備多模態感知能力,能夠捕捉細微的觸覺變化。Meta 聲稱,該感測器可以模擬人類的觸覺,支援振動、溫度等多重感知能力。

Meta Digit Plexus 則是一個開放性的平臺,號稱能夠整合多種感測器,使機器人能夠更全面地透過感測器感知周圍環境,並透過統一標準實時對接 AI 大腦進行反應。
此外, Meta 還開發了 PARTNR 基準,這是一項用於評估人機協作能力的測試框架,旨在測試機器人 AI 系統在實際生活場景中的計劃和推理能力,該測試框架內建 10 萬個自然語言任務,能夠模擬居家環境中的各種情境,幫助開發者測試機器人對於自然語言的理解能力及執行能力。
Meta 現已對外公開這些技術和資料供研究者使用,包括論文、開原始碼和模型等,鼓勵更多研究社羣參與觸覺技術的創新研究,IT之家附相關專案地址如下(點此訪問)。
本站內容由互聯網用戶自發貢獻,該文觀點僅代表作者本人。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。如發現本站有涉嫌抄襲侵權/違法違規的內容,請發送郵件至舉報,壹經查實,本站將立刻刪除。